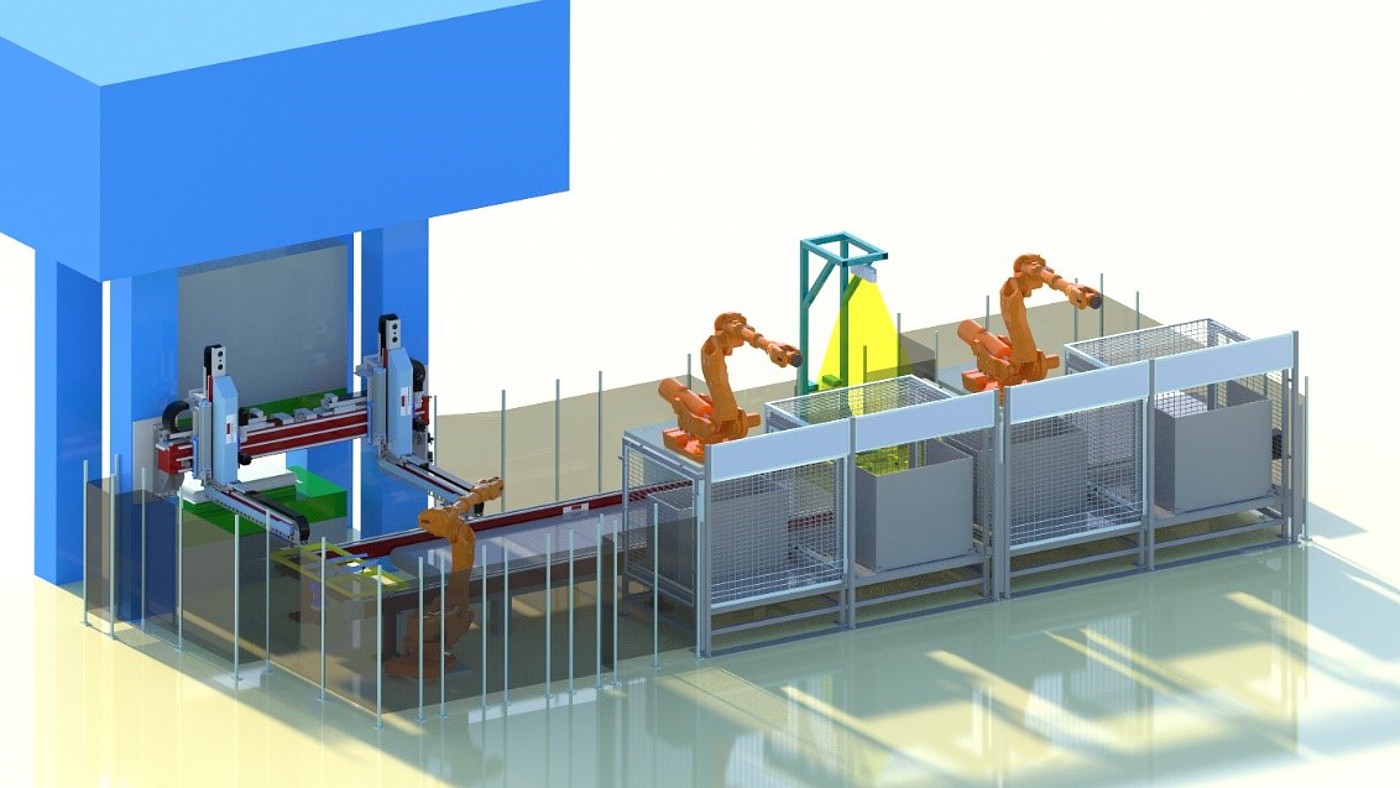
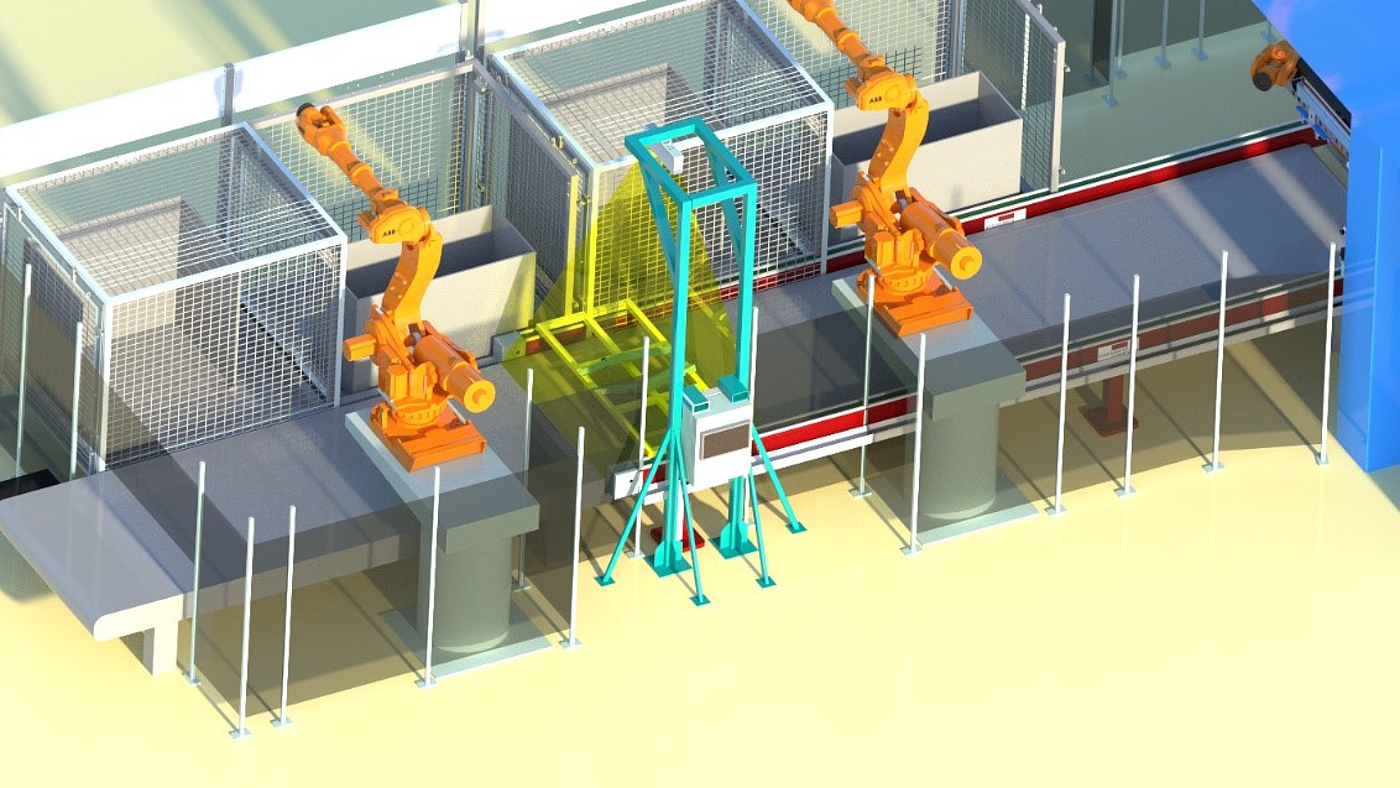
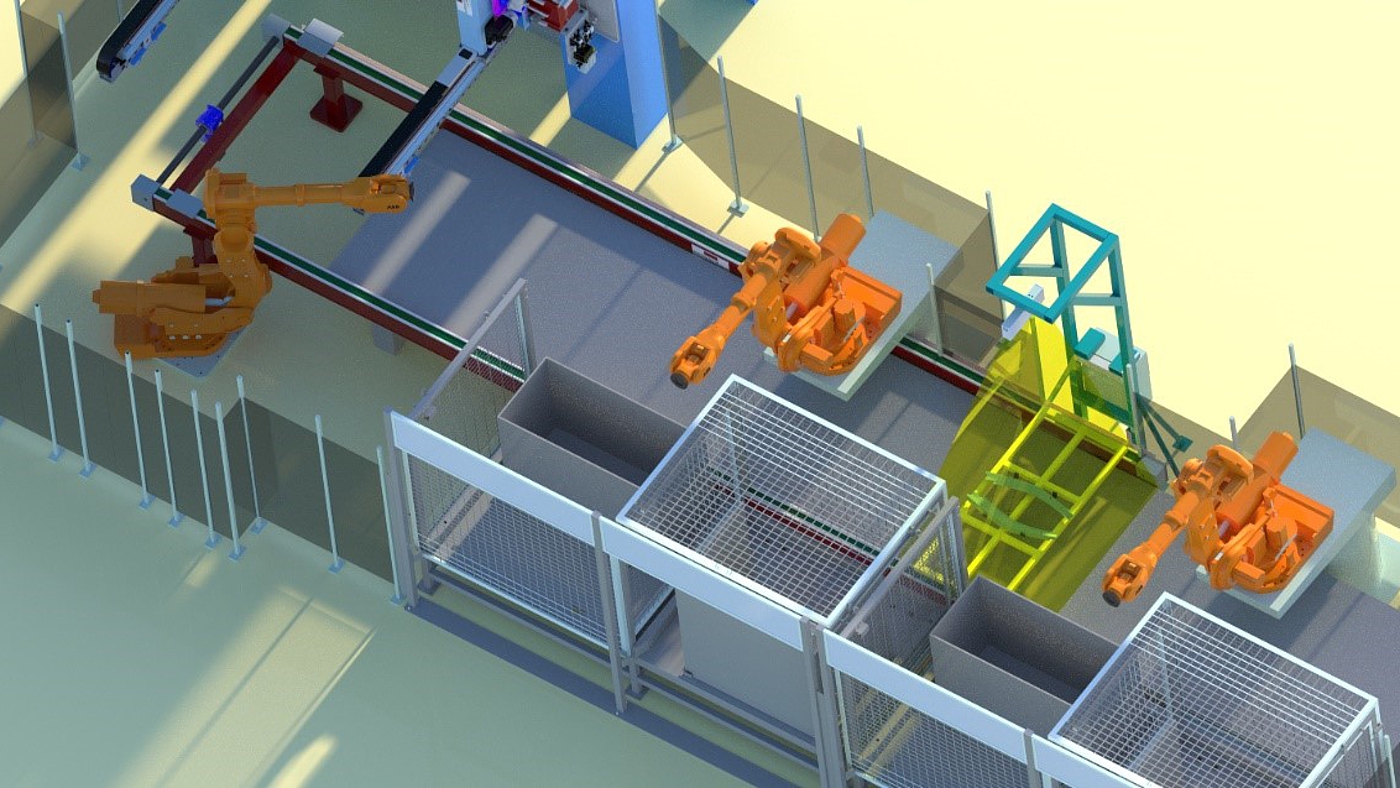
Lageerkennungssysteme
Sollten im End of Line Bereich die Bauteile direkt nach der Pressenentladung auf ein Auslaufband gelegt werden, so ist im Anschluss für den Stapelroboter eine positionsgenaue Lageerfassung erforderlich. HORSTKEMPER integriert dafür Kamera- und Scannersysteme namhafter Hersteller. Sobald die Lage des Bauteils detektiert ist, richtet der Stapelroboter das Tooling an der Position des Werkstücks aus und übernimmt parallel während der Fahrt zum Stapelbehälter die Lagekorrektur der umgeformten Bauteile. Die optischen Lageerkennungssysteme zeichnen sich durch eine hohe Flexibilität und Prozesssicherheit aus.
Ansprechpartner

Helmut Wiesing
Geschäftsführer
Telefon : +49 2944 9702 0

Jens Bergmeier
Projektmanagement
Telefon : +49 2944 9702 17